Product Parameters
| Logistics Robot Control Board |
| Base Material: |
FR-4 |
| Certification: |
RoHS, ISO |
| Layers: |
Multilayer |
| PCBA QC: |
X-ray, Aoi Test, Function Test(100% Test) |
| Solder Mask Color: |
Green/Black/Red/Blue/Yellow/White/ |
| Min.BGA Space: |
0.3mm |
| Min. Component: |
01005 |
| Name: |
Logistics Robot Control Pcba Board |
Product Display
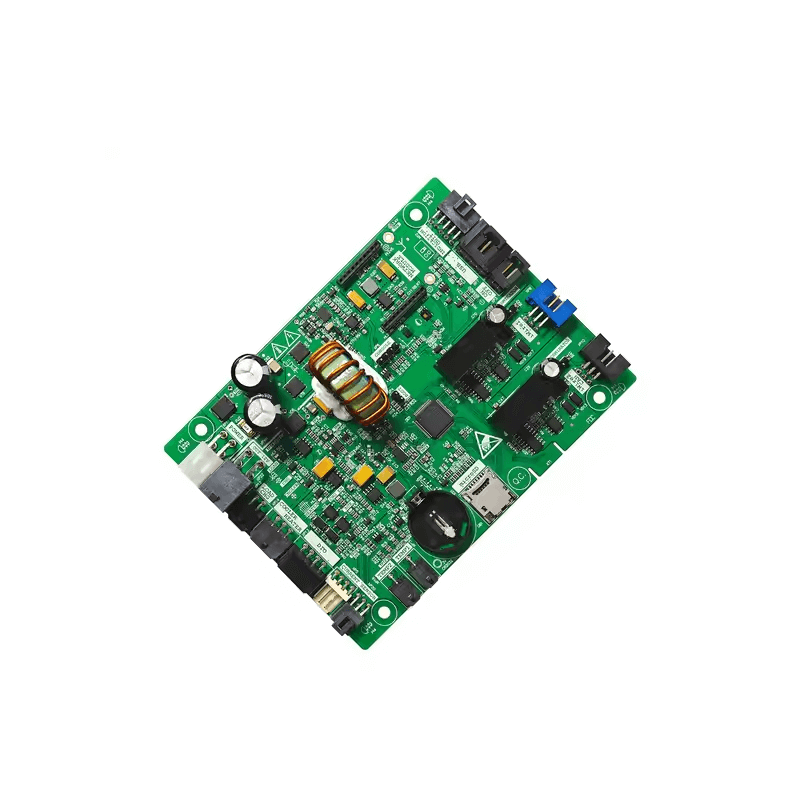
The control board for logistics robots is the core control unit of logistics robots, integrating a variety of key electronic components and functional modules. It mainly consists of a microprocessor, sensor interfaces, motor drive interfaces, communication interfaces, and a storage unit.
The microprocessor is the heart of the control board. Like the robot's brain, it is responsible for executing complex algorithms and instructions. Its performance determines the robot's computing speed and the ability to handle complex tasks. It can coordinate the actions of various robot components according to preset programs and real - time received information.
The sensor interfaces are used to connect various types of sensors, such as visual sensors (cameras), LiDAR, ultrasonic sensors, and collision sensors. These sensors collect information about the robot's surrounding environment, including the position, distance, shape, and speed of objects, and then transmit this data to the microprocessor through the interfaces for analysis.
The motor drive interfaces are connected to the power system of the logistics robot, usually drive motors. The control board sends precise control signals to the motors through these interfaces, adjusting the motor speed and direction, thus enabling the robot to move, such as moving forward, backward, and turning.
The communication interfaces are channels for the logistics robot to interact with external systems. It can support multiple communication protocols, such as Wi - Fi, Bluetooth, Zigbee, or Ethernet. Through this interface, the robot can receive task instructions from the Warehouse Management System (WMS), such as cargo handling routes and picking/dropping positions. At the same time, it can also feedback its own status information (such as position, battery level, task progress, etc.) to the external system.
The storage unit is used to store the robot's operating system, control programs, map data, and various configuration parameters. Its capacity depends on the complexity of the robot's functions and task requirements. Sufficient storage capacity ensures that the robot can store multiple task processes and map information to adapt to different logistics scenarios.
- Warehouse Logistics Centers
- In warehouse logistics centers, the control board for logistics robots drives Automated Guided Vehicles (AGVs) or Autonomous Mobile Robots (AMRs) to complete cargo handling tasks. Through the LiDAR and visual sensors connected to the control board, the robots identify the positions of shelves and goods. Under the command of the control board, they accurately reach the designated shelf positions to pick or drop goods along the preset paths or self - planned routes. For example, in large e - commerce warehouses, robots can transport goods from the storage area to the sorting area according to the instructions sent by the warehouse management system, greatly improving the efficiency of cargo handling.
- For some warehousing scenarios that require cargo sorting, the control board for logistics robots can control sorting robots. These robots use the connected visual sensors to identify the labels or shapes of goods, and then operate the robotic arms according to the instructions sent by the control board to sort different types of goods into different areas.
- Port Logistics
- At ports, the control board for logistics robots is used to control container handling robots. These robots use sensors such as ultrasonic sensors and visual sensors to locate containers and transport vehicles in the complex port environment. According to the instructions from the port dispatching system, the control board drives the robots to load and unload containers from ships to transport vehicles, or to stack and organize containers in the port yard. This automated operation improves the efficiency of port cargo handling and reduces labor costs.
- It can also be applied to port logistics inspection robots. Under the action of the control board, these robots use the connected sensors to inspect port equipment (such as cranes, conveyor belts, etc.), and monitor the operating status and potential safety hazards of the equipment in real - time. Once an abnormal situation is detected, the robot promptly feeds back the information to the port management system through the communication interface.
- Express Delivery Distribution Centers
- In express delivery distribution centers, the control board for logistics robots can control package sorting robots and delivery robots. The sorting robots use sensors to identify the destination information of packages, and under the command of the control board, quickly sort packages into the corresponding distribution areas. The delivery robots, under the control of the control board, transport packages from the distribution center to the designated delivery points according to the delivery route plan. This automated sorting and delivery method can significantly improve the speed and accuracy of express delivery processing.
- High - performance Processing Capability
- The microprocessor of the control board for logistics robots usually has high - performance processing capabilities, capable of quickly processing a large amount of sensor data and complex control algorithms. For example, some advanced control boards use multi - core processors, which can simultaneously process the image data from visual sensors and the point - cloud data from LiDAR, enabling the robot to perceive the surrounding environment in real - time and make quick decisions.
- It supports hardware acceleration functions, such as a GPU (Graphics Processing Unit) for image processing or a dedicated chip for accelerating machine - learning algorithms. This helps the robot to recognize objects and plan paths more quickly, improving its adaptability and work efficiency in complex logistics environments.
- Rich Sensor Interfaces and Compatibility
- It is equipped with a variety of sensor interfaces, compatible with mainstream sensors for logistics robots on the market. Whether it is a high - precision LiDAR, a high - resolution visual sensor, or a simple ultrasonic sensor, it can be easily connected to the control board. Moreover, these interfaces can support different communication protocols and data formats, ensuring the accurate transmission of sensor data.
- It has the function of automatically identifying and configuring sensors. When a new sensor is connected, the control board can automatically identify its type and parameters and configure them according to preset rules, reducing the need for manual intervention and improving the scalability and flexibility of the robot system.
- Powerful Motor - driving Ability
- The motor drive interfaces provide sufficient power output, capable of driving different types and powers of motors. Whether it is a small DC motor for driving the wheels of an AGV or a high - power AC motor for controlling the robotic arm of a large - scale container handling robot, the control board can provide a stable drive signal.
- It has precise motor control functions, such as using advanced Pulse - Width Modulation (PWM) technology to accurately control the speed and direction of the motor. This enables logistics robots to achieve high - precision movement and operation, such as accurately docking and picking/dropping goods in narrow shelf aisles.
- Reliable Communication Ability
- The communication interfaces have high reliability and stability, capable of maintaining good communication quality in complex logistics environments. For example, in a warehouse with a large number of metal shelves and electromagnetic interference sources, the Wi - Fi or Bluetooth communication interfaces of the control board can still ensure a stable connection with the external system.
- It supports multiple communication protocols and encryption methods to meet the security requirements of different logistics scenarios. When communicating with the warehouse management system or other critical systems, secure communication protocols such as Ethernet communication encrypted with TLS/SSL can be used to prevent data leakage and malicious attacks.
- High Reliability and Durability
- The control board for logistics robots uses industrial - grade electronic components, which have passed strict quality inspections and reliability tests. It can operate stably for a long time in harsh logistics environments, such as in high - temperature, high - humidity, and dusty warehouse environments or the coastal environment of a port.
- It has protection mechanisms, such as over - current protection, over - voltage protection, and short - circuit protection, to prevent damage to the control board caused by motor drive or other external device failures. At the same time, it also has a hardware watchdog timer to monitor the operating status of the system. When the system fails, it can automatically restart to ensure the continuous operation of the robot.
Only logged in customers who have purchased this product may leave a review.















Reviews
Android industrial control board